
Volver al Indice – artículos sobre Cine Fantástico / un artículo de Alejandro Franco
Mientras los escritores fantaseaban con androides todopoderosos asesinos, la limitada tecnología de los años 50 y 60 apenas llegaba a construir brazos robóticos funcionales. Ficción versus realidad en esta segunda entrega de nuestro informe sobre la historia de los robots.
Los años 50 marcan un punto de inflexión en la historia de los robots. Lo que ocurre es que, cinco años antes, la humanidad había ingresado de lleno en la Era Atómica – con los bombardeos nucleares de Hiroshima y Nagasaki en el final de la Segunda Guerra Mundial – y ello había puesto a la ciencia en el ojo de la tormenta. Mientras que algunos veían al átomo y a la comunidad científica como heraldos de un futuro promisorio, muchos otros pensaban que eran una horda de amorales, individuos embelesados con su propio intelecto y los cuales habían abierto la puerta a un inminente apocalipsis.
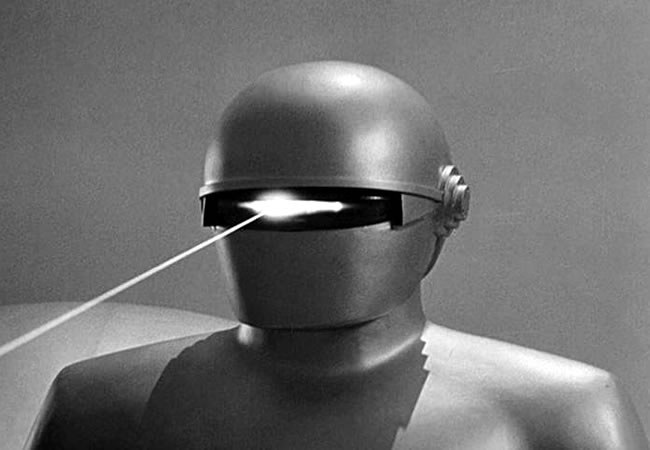
La discusión sobre el rol de la ciencia en el futuro de la humanidad pronto se trasladó a los terrenos de la ciencia ficción, la cual dió lecturas de todo tipo y calidad sobre la candente realidad. El cine aprovechó la euforia del momento y puso a la sci fi – hasta ese entonces, relegada a seriales baratos, comics y literatura popular – en la palestra de las grandes pantallas. Y, en toda esa vorágine, surgieron algunos prototipos robóticos de figura memorable. Entre ellos figura Gort – el implacable guardián mecánico de El Dia que Paralizaron la Tierra (1951) – y el amable sirviente Robby del clásico Planeta Prohibido (1956).
Ciertamente no eran robots realistas – la tecnología de la época estaba a décadas de lograr algo remotamente parecido -, pero sirvieron como punto de inspiración para generaciones enteras de futuros científicos, quienes imaginaron primero y estudiaron después los medios para intentar construir algo parecido a aquello que los había desvelado durante su juventud. Y, en toda esa vorágine, surgió el primer robot real – Unimate – en 1961.
Desde ya, Unimate no era ni por asomo un autómata platinado con diseño de art decó al estilo de Gort; se trataba simplemente de un brazo mecánico programable. Desarrollado por George Devol a lo largo de la década del 50, recién pudo patentarlo en 1961 y terminó por vendérselo a la General Motors para su planta ensambladora de Ewing Township, Nueva Jersey. Se trató del primer robot industrial de la historia. ¿Su trabajo?. Tomar piezas de acero candente y encastrarlas en el chasis de los autos de la línea de producción de la GM.
Mientras que los robots reales estaban en pañales, la comunidad científica se estaba preparando para los estadíos siguientes, aún cuando su materialización pareciera imposible. Alan Turing formulaba en 1950 su famoso test para chequear el grado de independencia intelectual que podría tener una máquina inteligente. Por otra parte Isaac Asimov escribía sus famosas Tres Leyes de la Robótica, en donde postulaba que los androides debían servir al hombre y preservar su existencia, amén de poder cuidar la suya propia. Vale decir, nadie concebía a los robots como títeres mecánicos – como ilustraba el clásico corto The Mechanical Monsters de la saga de Superman producida por Richard Fleischer en 1941: autómatas dirigidos a control remoto y sin posibilidad de voluntad propia – sino que preveían su avance hasta el punto de una total independencia funcional. El concepto de robot pronto quedó asociado al de inteligencia artificial, anticipando que era necesario alguna especie de computador miniaturizado que hiciera las veces de cerebro, el centro de comando automático e independiente del androide.
Desde ya, en los años 50, eso era un imposible. Unimate era un mecanismo repetitivo, programable en una serie de funciones relativamente simples. Otros robots posteriores siguieron su mismo modelo – la universidad de Standford diseñó un brazo robótico para asistir a pacientes discapacitados del hospital de Downey, California en 1963; Marvin Minsky desarrolló una serie de brazos robóticos de movimiento complejo y altamente articulados a partir de su prototipo de 1968 -, pero habría que esperar a 1970 con la aparición del primer modelo funcional de Shakey – un robot móvil capaz de reconocer el terreno y corregir automáticamente sus patrones de dirección – para obtener a un verdadero autómata capaz de tomar sus propias decisiones (por básicas que fueran). El robot causaría tal impacto en el público que terminaría siendo homenajeado – en una especie de versión asesina manufacturada en la Unión Soviética y plagada de armas letales – en un capítulo de la popular serie El Hombre Nuclear (S04EP13, “La Sonda Mortal”).
Ciertamente el tosco diseño de Shakey era mucho mas pragmático y realista que cualquier diseño humanoide surgido de las páginas de la ciencia ficción literaria o cinematográfica – fueran los Cibernautas de la serie británica de culto Los Vengadores (1961 – 1969), o los robots fuera de control del parque de diversiones Oestelandia (1973) escrita por Michael Crichton –. Mantener el equilibrio sobre dos piernas de una máquina extremadamente pesada representaba un desafío tan complejo como inútil: el ordenador a cargo debía tener tal velocidad de procesamiento que fuera capaz de realizar multitud de correcciones ínfimas pertinentes a distribución de peso y postura en fracciones de segundo, eso sin contar con el reto que implicaría que dicha máquina hiciera el intento de desplazarse a gran velocidad – léase correr – sobre superficies de textura y diseño impredecibles. Un robot autómata de diseño realista debería ser algo más parecido a un tanque inteligente, dotado de orugas todo terreno, lo cual le da una óptima distribución de peso a la vez que le provee un medio de desplazamiento eficiente y que puede operar a gran velocidad. Otros diseños alternativos físicamente creíbles son los multipodales, los cuales terminan dando a luz máquinas similares a arañas mecánicas.
Mientras tanto, los brazos robóticos comenzaban a complejizarse. La razón: los primeros pasos de inteligencia artificial aplicados en los computadores que los controlaban. Los robots Freddy I y Freddy II eran manipulados por una Honeywell H316 dotada apenas de 16 Kb de memoria; pero su programa – desarrollado con el lenguaje POP-2, uno de los primeros escritos especialmente para programación funcional – podía asimilar nuevas rutinas y, en apenas un par de días, el robot podía estar ejecutando nuevas acciones. La sensibilidad de los Freddy era tal que podían ensamblar las partes minúsculas (y extremadamente delicadas) de juguetes pequeños como autos y barcos a escala, de un tamaño no mayor a la palma de la mano.
Y mientras la industria avanzaba a pasos lentos pero seguros, en una galaxia muy, muy lejana se asomaban dos androides tan valientes como torpes, dos robots prototípicos que surcarían las pantallas de todo el mundo y que crearían un nuevo standard cinematográfico. No eran autómatas asesinos ni robots mudos y serviciales, sino una delirante muestra – siquiera ficticia – de inteligencia artificial, dotados de personalidad propia y un inadecuado sentido de la aventura. 1977 marca la llegada de C3PO y R2D2, los escuderos del legendario héroe Luke Skywalker en el clásico La Guerra de las Galaxias… un filme que haría época y que realimentaría los sueños de una nueva camada de creativos e inminentes científicos, ingenieros incipientes de un futuro que aún estaba por escribirse.